
簡述步進電機的工作原理(混合式步進電動機的工作原理)
- 發布時間:??2021-03-15
- 分類:行業資訊
- 作品聲明:內容由AI生成
- 來源:網絡
圖中的電動機定子具有4個沿圓周均勻分布的齒,并且線圈纏繞在齒上并成對連接。兩個極性不同的轉子各有三個齒。在該圖中,實線表示S段,虛線表示N段,并且兩個轉子錯開一半的節距。
當繞組中沒有電流時,轉子傾向于處于N極和S極的有限位置,因為轉子的永磁體總是試圖減小磁路的磁阻。每個轉子都有一個定子極和對齊的齒。圖中的馬達有12個位置。將轉子保持在這些位置的扭矩通常不大,稱為保持扭矩。
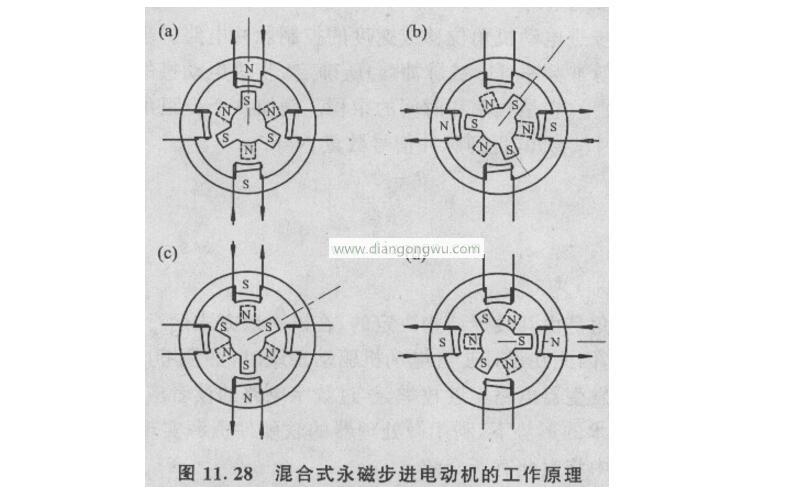
如圖11.28(a)所示,如果有電流流過相繞組,則由定子產生的N極和S極會吸引二元轉子段的齒。在轉子上齒數相同的三個穩定位置中,將轉子拉離定位位置的扭矩要大得多,這稱為鎖定扭矩。
當通電模式從圖(a)切換到圖(b)時,定子磁場旋轉90度。然后拉出另一對齒以使轉子旋轉30。對應于整個步驟。在圖(b)至圖(c)中,勵磁返回到先前的繞組,但是電流的方向相反,因此轉子可以前進一個步驟。在圖(d)中,第二相繞組電流可以反向并向前移動。這樣,轉子穿過齒距。從圖(d)返回到圖(a),形成了電動機的旋轉運動,每個旋轉需要12步。顯然,以相反的順序給定子繞組通電將使電動機反向。
通常,定子的小齒以與轉子不同的螺距均勻分布。在具有大量齒的電動機中,定子和轉子的節距被安排為只有兩個齒。兩者在轉子的相反側相隔180度。定子齒完美對齊。同時,它們相距90片。機械角的定子和轉子齒完全交錯。對于具有這種結構的混合動力電動機,可以使用以下公式計算每轉的步數。 N=┃NrNs/(Ns-Nr)┃
其中,N是每轉的步數,Nr和Ns分別是轉子和定子的齒數。步進電機是為精確位移而設計的,必須具有小電流和大電流才能獲得高精度和高效率,并且可以在不向DC電機供電的情況下運行。此外,步進電機使用單個芯片來生成脈沖以控制轉矩。單片機本身具有較小的驅動電流,并且不能驅動電動機繞組。要產生大電流,需要使用驅動電路。它將燒毀一臺單片機。
熱門資訊:

請關注我們
江西電機
地址:上海市松江區莘磚公路399弄
座機: +86-021-6992-5088
傳真: +86-021-6992-5099
郵箱: 18717976220@163.com
Copyright ? 2020 江西電機?版權所有 網站圖片內容來源于網絡,如有侵權請聯系刪除。
滬ICP備16040912號-18