
步進(jìn)電機(jī)原理(混合式步進(jìn)電機(jī)的結(jié)構(gòu)及工作原理)
- 發(fā)布時(shí)間:??2021-05-24
- 分類:行業(yè)資訊
- 作品聲明:內(nèi)容由AI生成
- 來源:未知
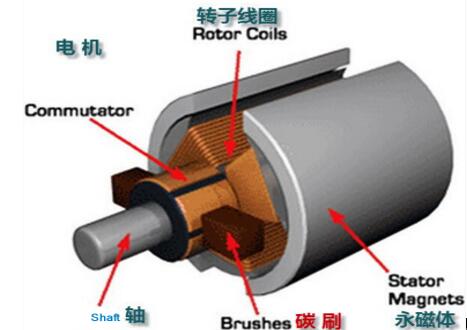
由于定子的相同極的兩端是相同的,因此轉(zhuǎn)子的極性相反,但是當(dāng)配置的一半部分被配置時(shí),如果旋轉(zhuǎn)電子偏離平衡位置,則有源扭矩的方向是一致的。在相同的結(jié)束時(shí),定子與第三極性的極性相反,轉(zhuǎn)子是相同的極性,但是極和第三桿是固定的,并且小齒的相對(duì)位置舉例說明齒的一半距離一半。另外,發(fā)生動(dòng)作扭矩的方向。當(dāng)閂鎖處于陽極和陰極電脈沖時(shí),旋轉(zhuǎn)電子打開臺(tái)階角θ和值

θ=360°/2mz

在式中,M是電子齒數(shù)的次數(shù); z。 步進(jìn)電機(jī)還產(chǎn)生較小的步進(jìn)角,因此具有更高的功耗,并且工作頻率:也是:并且具有定位扭矩,反應(yīng)性和永磁步進(jìn)電機(jī)。兩個(gè)優(yōu)點(diǎn)。然而,需要正極和語音電動(dòng)脈沖,并且制造過程更加復(fù)雜。 (3)常用于兩相混合步進(jìn)電機(jī)的提取模式 1單4次射擊能量模式。每次通電時(shí),一個(gè)相控制繞組能量構(gòu)成四個(gè)截圖,并且兩相控制繞組按A-B-(-A)1(-B)+ A的順序循環(huán)。鏡頭在1/4電子距離轉(zhuǎn)動(dòng)距離和每個(gè)步驟的步數(shù)為4zr。 2雙4拍能量效應(yīng)模式。如果同時(shí),雙相控制繞組,四個(gè)拍攝周期,兩相控制繞組按AB-B(-A) - (-A)(-B)1(-B)A-AB輪序流動(dòng)。相同的三個(gè)鏡頭是相同的,每個(gè)轉(zhuǎn)子都在1/4轉(zhuǎn)子齒距離上,每個(gè)步長(zhǎng)的步數(shù)為4zr。然而,兩個(gè)人的空間定位不匹配。 3單,雙8拍通信模式。前兩種能量方法前面的循環(huán)端口數(shù)量如下: (-a)(-a)(-b)(-b)(-b)(-b)(-b)(-b)(-b)( - )b)半步稱為通電。 AA序列的順序當(dāng)前是流動(dòng)的,并且每個(gè)轉(zhuǎn)子都達(dá)到1/8秒齒距離。 四個(gè)子通電。當(dāng)調(diào)整兩相繞組中的電流分配的比率和方向時(shí),復(fù)合扭矩可以處于空間中的任何位置,并且可以任意地稱為細(xì)分的循環(huán)端口的數(shù)量。從本質(zhì)上講,階梯角減少,如八槍的正面,四射或四次射擊分為一半。使用細(xì)分功率是步進(jìn)電機(jī)的操作,定位分辨率增加,負(fù)載容量增加,并且步進(jìn)電機(jī)可以作為低速同步執(zhí)行。
熱門資訊:

請(qǐng)關(guān)注我們
江西電機(jī)
地址:上海市松江區(qū)莘磚公路399弄
座機(jī): +86-021-6992-5088
傳真: +86-021-6992-5099
郵箱: 18717976220@163.com
Copyright ? 2020 江西電機(jī)?版權(quán)所有 網(wǎng)站圖片內(nèi)容來源于網(wǎng)絡(luò),如有侵權(quán)請(qǐng)聯(lián)系刪除。
滬ICP備16040912號(hào)-18