
步進電機有幾種(步進電機的靜態轉矩特性)
- 發布時間:??2021-03-11
- 分類:公司動態
- 作品聲明:內容由AI生成
- 來源:網絡
步進電機的線圈通過直流電通電時的負載轉子的電磁轉矩(恢復與負載轉矩平衡產生的電磁轉矩稱為靜轉矩或靜轉矩)與功率角轉子之間的關系這稱為電動機的靜態轉矩特性。如下圖所示:
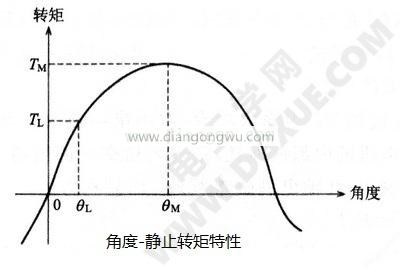
由于轉子是永磁體,因此產生的氣隙磁通密度為正弦波分布,因此理論上靜態轉矩曲線為正弦波。該角度固定轉矩特性是步進電動機產生電磁轉矩的能力的重要指標。大轉矩越大越好,并且轉矩波形的正弦曲線越近越好。實際上,在刺激下存在齒槽轉矩,這會扭曲所產生的轉矩。例如,兩相電動機的齒槽轉矩是加到正弦靜態值上的靜態轉矩角周期的諧波的四倍。扭矩,上圖中所示的扭矩如下。
TL=TMsin[(θL/θM)π/2]
其中,TL和TM分別代表負載轉矩和大靜態轉矩(或保持轉矩),相應的動力角為θL和θM,該位移角的變化決定了步進電機的位置精度。根據上面的公式:
θL=(2θM/π)arcsin(TL/TM)
在前面的過程中提到了PM型永磁步進電機和HB混合式步進電機的步進角θs。 θs=180°/PNr,將角度更改為機械角度(以弧度為單位),我們得到以下公式:
θs=π/(2Nr)
上面的公式Nr是轉子齒或極對的數量,因此兩相電動機θM=θs。
負載扭矩是帶有電磁扭矩的負載(例如彈簧力或重物的提升力等)。電動機來回移動時,角度偏差為2θL。 ΘL應該很小以增加定位精度。因此,根據公式θL=(2θM/π)arcsin(TL/TM),您需要選擇大靜轉矩Tm大且步距角θs小的步進電機。 -解析電機。根據公式θs=π/(2Nr),我們可以看到θs越小,Nr越大越好。
另外,高分辨率步進電機的轉子結構可大致分為PM型,VR型和HB型,其中HB型具有分辨率。由于PM型定子極的爪級結構,定子極數的增加受到機加工的限制。 HB型轉子的表面沒有齒,并且N極和S極在轉子表面交替磁化,因此極數為極對Nr。同樣,轉子極Nr的增加也受到磁化機的限制。如果VR型轉子的齒數與HB型相同,則可以使用相同的Nr,因為不使用永磁體,但是步距角θs是HB型的兩倍,并且由于沒有永磁體極,大扭矩Tm小于HB型。
當兩相步進電動機的外徑約為42mm,Nr=100個齒,并且步進角為0.9°時,它是實際使用中的高分辨率。隨著Nr的增加和電抗的增加,轉矩在高速下降低。因此,Nr=50且步距角為1.8°的電動機被廣泛使用。對于HB型結構,整個步進狀態下的步進角精度為±3%,步進電機工作角θ=nθs,并且每個步進均無累積誤差。如果電動機速度足夠大,則增加n。盡可能提高定位精度(θs小)。
熱門資訊:

請關注我們
江西電機
地址:上海市松江區莘磚公路399弄
座機: +86-021-6992-5088
傳真: +86-021-6992-5099
郵箱: 18717976220@163.com
Copyright ? 2020 江西電機?版權所有 網站圖片內容來源于網絡,如有侵權請聯系刪除。
滬ICP備16040912號-18